| 【舞台は宇宙へ】 衛星通信をやる 製作編 2023年夏 | ||
まだまだやり残したことがあったのだが、それが衛星通信。 確か1980年前後だったか、OSCAR衛星がいくつか上がったころ、 RS衛星に2mでアップ、29MHzでダウンして自分の信号を聞いたり、 日本製の衛星を聞いたりした記憶はあるのだが真剣にやったことはなかった。 最近はISS国際宇宙ステーションや低高度衛星、中高度のGREENCUBE とか使えそうな衛星がいくつかあるようなので一発奮起で設備を揃えてみた。 ただ、衛星を使った交信は時間が限られ毎日沢山QSO出来るわけでなく、 設備の投資に対して満足度は低いことが予想され、期待外れになる恐れが多分にある。 そこで今回の目標は できるだけ自作 ということとした。 AZ,ELローテータも作っちゃおう、自動追尾も自作、という部分での満足感も求めた。 設備はまずGREENCUBE用に ● 435MHzのパケット送受 ● 10数dBiの円偏波アンテナ ● アンテナ直下プリアンプ ● ドップラー制御 ● アンテナ自動追尾 のソフト、ハードを用意する。 低高度衛星用に2mのアンテナも用意する。 |
||
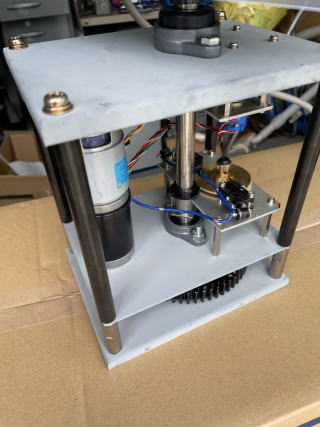  |
AZ ROTOR MOTOR:Type775 DC12V 7RPM 遊星ギアで7PRPMまで減速されている。 それをM2歯車で1RPMぐらいまで減速 回転角度センサーはBourns 3590S 10回転ポテンショメータ を使った。 センサーとしては約9回転で360度回る ようにしている。 Limit SW を使い回転角度を360degぐらいに 制限している。 |
|
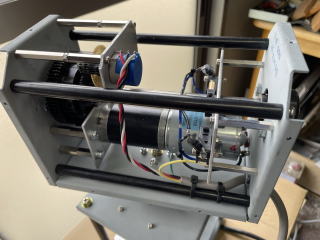 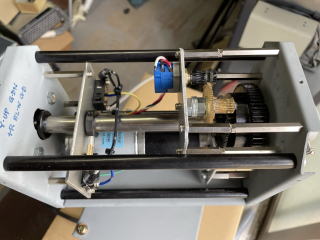 |
EL ROTOR MOTOR:Type775 DC12V 7RPM 遊星ギアで7PRPMまで減速されている。 それをM1歯車で1RPMぐらいまで減速 回転角度センサーはBourns 3590S 10回転ポテンショメータ を使った。 センサーとしては約9回転で180度回る ようにしている。 Limit SW を使い回転角度を180degぐらいに 制限している。 回転角度を180度としたのはフリップモードに対応するため。 90度maxでも使えないわけではない。 フリップモードはまだ試したことはない。(反転した時ケーブルが からまりそうで怖いので) |
|
  |
AZ、EL CONTROLER 仰角、方位角の制御に必要なものをすべて詰め込んだ。 PCが無くても手動制御できるようLCD表示と手動SWを付けた。 パソコンとの接続は、PC側でCALSAT32.exeで自動制御 するのでそれに対応したUSB I/Fの FSIOを使った。 2つのモーターの回転速度はPWMコントローラで可変できる。 モーターの回転正逆切替はリレー。 回転角度センサーの電圧はOPアンプでゼロ、フルのスケール調整後 AZ:0-360deg=>0-3.6V EL:0-180deg=>0-3.6V としPC側のA/Dに渡す。 ゼロ点はパネルのポテンショメータで調整できる。 |
|
  |
USB Interface リグはIC910なのでいろいろなインターフェースが必要 1,USB audio 2,CAT (CI/V) インターフェース 3,PTT インターフェース 4,4ch USB Hub 残り1chはAZEL CONTORLERへ IC9700を使い、もっと統合化されたソフトを使えばこんなI/Fは 不要と思うが、手持ちの色々なI/Fのためこうなった。 1,sounmodem.exe,Greencube Terminal=>USB audio 2、SatPC32(ドップラー制御)=>CAT(CI/V)インターフェース 3,soundmodem.exe=>PTT 送信制御 4,CALSAT32.exe=>FSIO経由AZELコントローラ 2と3はCH340G USBI/F用ICを使い自作した。 アンテナ直下プリアンプ、同軸リレーの駆動もここから行っているが プリアンプをスルーするSWを設けた。 2バンド同時操作とか不注意でプリアンプに送信出力をブチ込む可能性 があるので。それでも壊すバカがここにいますけど。 |
|
 |
PRI AMP アンテナ直下に2個の同軸リレーとともに載せている。 30年ほど前、EMEをやったころ良く作りました。 入力は70Ωの同軸構造 Hi-Qトリマは持ってて良かった GaAS-FETは多分三菱のMGF1402かそのあたり ソースを浮かすベタコンも捨てなくて良かった。 ドレイン側はFB801のトランス式 ドレイン電流は15mAぐらい流し電圧は3Vとした 全体は銀メッキをかけた 調整はSGよりFMを加え了解度が最良になるようにしている。 経験上NFメータよりこっちのほうが良い。 NFメータはアンプの能力を評価するには良いがそのまま実装しても 再現できるとは限らない。 これでメーターの上ではサンノイズが見えた。 |
|
  |
70cm ANTENNA 最初はWA5VJBのCheep Yagiを作ったがSWRが敏感で 使用を躊躇した。 そのため自作ではないがダイヤモンドの15エレを2本使い円偏波とした。 V/H両方前後の位置は同じとして2本のあいだの給電ケーブルに 1/4波長の差を設けた。 2分配器はQマッチとし75Ω同軸ケーブルで作り、VNAで電気長を確認、 分配後給電部までのケーブルは1/4波長ぶんの差があることをVNAで 確認した。 下から AZローター、ELローター、プリアンプ用タッパーの順 |
|
 |
2m ANTENNA MMANAで設計した2m2エレ八木 6dBのゲインと50Ωにマッチした給電部 ISSとかLEOにはこれで充分だった |
|
以下色々補足 1,必要なソフト類 アンテナ自動追尾:CALSAT32.exe USB-FSIO-AZELコントローラへ ドップラー制御:Satpc32iss.exe USB-CAT(CI/V)I/F経由でIC910のVFOA,Bへ書き込み パケット用モデム:soundmodem.exe トランシーバの送受制御もUSB経由で ターミナルソフト:OZ9AARのGreencubeTerminal <=絶対これを使うこと GREENCUBEはSSBモードでパケットを送るのでドップラー制御は重要である。 同様のパケット送受のLEDSATは高度が低いのでドップラー偏移が激しく制御はさらに重要となる。 送信中のドップラー補正や受信のデコード中のドップラー補正がデータの欠落につながるので トランシーバーも含めよく考えなければならない。 送信中に補正でVFOの書き換えが行われるとVFO-AとBの内容が入れ替わる場合があった。 Satpc32へPTT送受信号を与えれば対策できるらしい。 アンテナ自動追尾は±5度ぐらいは問題ないと思う。 モデムは現状1200bpsのAX25パケットでSSBモードで送れればよい。 OZ9AARのGreencubeTerminalはマルチアンサーモードがあるのでこれを勧める。 以上の構成でGREENCUBE,LEDSATは対応できる。 ISSのデジピータは2mのFMモードなのでドップラー補正はそんなに重要ではない。 また、ISSデジピータには uiss というターミナルソフトとsoundmodem.exe を使えば使える。 SSB,CW,FMレピータ衛星は2バンド同時送受できればパソコンは不要だろう。 ドップラ補正は手でVFOを回せば良い。 2,リグについて IC-910なので色々作れて楽しめるが、FBによればGREENCUBEのユーザーの58%はIC-9700 を使っているようです。 送信中にCATで周波数を送ったらどうなるか?持ってないのでわからない。 3,角度センサについて 市販ローテータは炭素被膜のボリュームを使っていると思うが、精度直線性はわからない。 普通の炭素被膜VRは測定してみたが300度の両端は精度が悪く、240度ぐらいの範囲がまともだが それでも角度換算で±5度ぐらいの誤差があった。 そのため10回転の巻線抵抗ポテンショメータを使った。直線性はすばらしい、±1度以内に入るだろう。 あとは歯車を組み合わせ、9回転ぐらいのあいだを使用するようにした。 4,耐久性、バックラッシュ AZELローテータを自作した場合問題になるのは耐久性とバックラッシュだろう。 今回はAZ、EL共メインシャフトの駆動は歯車のためバックラッシュは避けられない サイズが許せばベルト駆動にしたかった。 耐久性はわからないが、歯車が壊れる、モータの遊星ギアが壊れる....など考えられるが 修理しやすい部分が壊れるのが望ましい。突風などにはアンテナ側が壊れた方が被害が少ない と考えている。とりあえずまだ壊れず使えている。 今更ながらローテーターの制御コマンド体系が世界的に統一できていれば面白いのにな、と思った。 5,円偏波と指向性 衛星自身は直線偏波なのだが衛星の回転に対応するためアンテナは円偏波の方が良いとのこと。 直線−直線 に対し 直線−円 は3dBロスる。しかし垂直−水平は理論的には無限大のロスとなるので 3dBのロスを覚悟しても円偏波を推奨されるようだ。 円偏波の作り方はいろいろあるが、今回は垂直、水平の前後位置は同一とし、2つの給電部に 1/4波長ぶんの差を設ける方法とした。ただ円形の具合については評価できていない。 サンノイズが見えたので、指向性をチェックしたのだがブームの方向とは少し違う方向にメインローブが 出ていた。VHで位相を変えると方向が変わるのだが、その原因は私の頭では解析できない。 まだ細かいことはたくさんあるのだがここまでの試行錯誤とか結構楽しめた。 GREECUBEで180QSOで43DXCC,110VUCCまでは行けた。 実際の運用結果は【運用編】で。 続く |
||